

IMU Nedir ?
Inertial Measurement Unit = İnersiyal Ölçme Ünitesi
IMU; ana işlemciye gönderilen açısal hız ve doğrusal ivme verisini tek bir modülde toplayan elektronik bir birimdir.
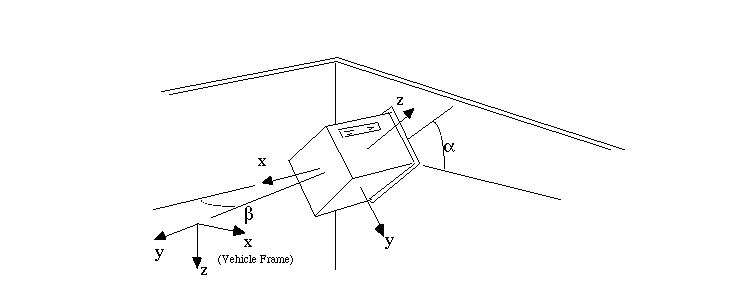
IMU’nun görevi cihazın veya aracın hızını, dönme açısını ve dönüklük miktarlarını belirlemektedir. Örnek olarak; Panoramik görüntüleme sistemlerinde hesaplanan konum ve dönüklük miktarları yardımıyla sistemin entegre olduğu kameranın elde ettiği tüm görüntüler hassas şekilde koordinatlandırılmaktadır.

IMU Bileşenleri
Sistemin bileşenleri ivme ölçer (accelerometer), jiroskop (gyroscope) ve bazen de manyetik alan ölçer (magnetometer)dir.
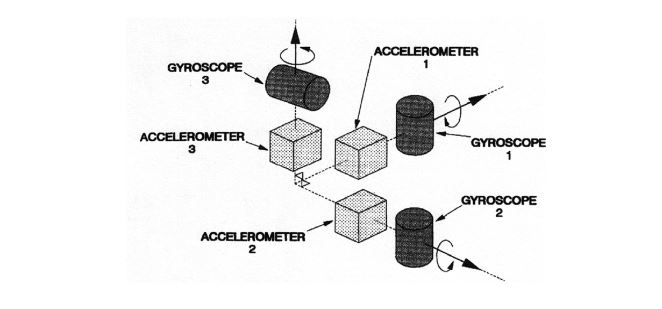
İvmeölçer; üç eksende üç ayrı analog sinyal üretir. İtici sistemden ve fiziksel limitlerden dolayı, ivme ölçen bu sensörlerdeki en önemli durum yer çekiminden etkilenmeleridir. Sensör sürekli olarak yer çekiminin etkisinde kalır. Ölçü skalası olarak bir, iki veya üç eksende ölçüm yapabilen türevleri vardır.
- IMU’nun içinde bulunan ikinci sensör ise jiroskoptur. Türkçe ifade ile kullanırsak dönüş ölçer diyebiliriz. Basitçe anlatırsak bir tekerleğin ekseni etrafında hızlıca döndürülmesi ile oluşur. Tekerleğin etrafındaki çembere dik açıyla tutturulan başka bir çember vardır. Bu çemberlere dik açıyla tutturulmuş başka bir çember jiroskobu temsil eder. Jiroskobun temelde iki özelliği vardır. Yatay eksende dönmekte olan bir jiroskobayatay eksende bir kuvvet uygulandığında eksen etrafında dönmeye başlar. Diğer özelliği ise jiroskobun dönüş eksenine sabit kalmasıdır.
- Jiroskop ve ivmeölçer tek başlarına güvenli ve stabil veriler sağlayamazlar. Bu yüzden birbirlerini referans alarak iki sensör birleştirilir ve hız, pozisyon gibi bilgiler tek bir birimden yani IMU’dan alınır.
IMU Kullanım Alanları
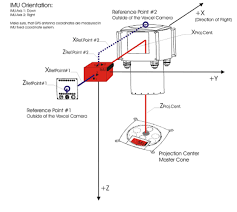
- IMU; Panoramik görüntü çekimlerinde, Fotogrametrik yöntemler ile hava fotoğrafı çekimlerinde GPS ile bütünleşik olarak çalışan bir sistemdir.
- IMU sayesinde yüzey problemleri giderilmekte, dönüklük miktarı proses sürecine dahil edilerek görüntü üzerinden yüksek hassasiyette ölçüm imkanı sağlanmaktadır.
- Hava fotogrametrisinde GPS-IMU verilerinin değerlendirilmesi sonucu resim orta noktası koordinat değerleri belirlenmekte ve bu değerler Jeodezik dengelemelere dahil edilmektedir.
- Türkiye genelinde TUSAGA-Aktif Projesi gerçekleştirilmiş ve 146 adet sabit GPS istasyonu tesis edilmiştir. Bu istasyonlara ait değerler, dijital kamera sistemleri ile elde edilen GPS/IMU kinematik verilerinin proses edilerek değerlendirilmesi sonucunda belirlenmiştir.
Kaynaklar;
http://www.ssl.umd.edu/projects/RangerNBV/thesis/2-4-1.htm
http://www.elektrikport.com/teknik-kutuphane/inertial-measurement-unit-(imu)-nedir/17369#ad-image-0
GPS/IMU Verilerinin TUSAGA – Aktif Sisteminin Sabit İstasyon Verileri İle Process Edilerek Resim Orta Noktası Koordinat Değerlerinin Belirlenmesi
Çetin MEKİK, Ömer SALGIN, İbrahim CANKURT, Serdar ERGÜNER, Hacı Bahadır ATEŞ, Tahsin KARA

